----------------- EFFETTO DOPPLER E RADIO DIRECTION FINDING --------------------
------------------------BY IK4CIE ----------------------
PREFAZIONE
Quello
che internazionalmente si chiama “Radio Direction Finding” (ricerca della
direzione di provenienza dei segnali radio), abbreviato con RDF, comprende sia
la ricerca della “volpe” piazzata intenzionalmente da chi organizza le
competizioni, sia la individuazione di ogni fonte di radiofrequenza come
disturbatori, interferenze, ecc.
Il
metodo più spontaneo ed usato da tutti per capire da dove proviene un segnale
radio, è l’uso di un’antenna direttiva tradizionale. L’antenna viene orientata
per il massimo segnale, e la direzione del boom ci da la direzione di provenienza.
Il vantaggio principale di questa tecnica è quello di poter essere usata da
tutti, in quanto non richiede strumenti particolari e nemmeno conoscenze
specifiche. Gli svantaggi sono la scarsa accuratezza della rilevazione, e il
tempo richiesto per una determinazione della direzione, che è circa 2 minuti se
la direttiva è installata su un rotore tradizionale. Ciò parlando di una
direttiva posta in installazione fissa.
Le antenne direttive per uso
portatile devono necessariamente essere più piccole, e quindi meno direttive.
Inoltre, non è possibile l’uso di questa tecnica su un mezzo in movimento come
l’automobile. Esistono altri sistemi più adatti alla ricerca in movimento. Il
presente articolo intende studiare i sistemi basati sull’effetto fisico Doppler
nelle due forme in cui esso è sfruttato per questi scopi: lo pseudo-Doppler e
il TDOA, che verranno qui ampiamente descritti.
CAPITOLO 1: TEORIA DELL’EFFETTO DOPPLER
Nel
1842, a Vienna, Christian Doppler (1803–1853) scoprì un effetto fisico che
porta il suo nome. L’effetto Doppler si applica a tutti i fenomeni ondulatori,
quindi sia ai fenomeni sonori che a quelli delle onde elettromagnetiche (onde
radio) e anche alla luce.
In
poche parole, l’effetto Doppler è quello per cui se una sorgente di onde ( acustiche,
radio, luminose, … ) si muove avvicinandosi all’osservatore, egli percepirà una
frequenza più alta, mentre se la sorgente si allontana dall’osservatore, egli
percepirà una frequenza più bassa. L’evidenza nel vivere comune è data dal
suono di un’ambulanza lanciata a forte velocità: la sirena pare avere un tono
più alto quando il mezzo si avvicina, e più basso quando si allontana. Facciamo
lo studio nel caso di onde acustiche; in realtà c’è differenza tra onde
acustiche ed onde elettromagnetiche, in quanto il mezzo in cui si propaga il
suono ha importanza per la propagazione stessa, mentre il mezzo non conta per
le onde elettromagnetiche; il comportamento è però analogo.
Qualche
formula: supponiamo che la sorgente si muova con velocità costante v rispetto all’osservatore fermo, ed emette onde con
frequenza f e quindi periodo T (dove T = 1 / f ). Per semplicità parliamo di impulsi emessi
ogni T secondi.
Al
momento t0 = 0 , la distanza tra la sorgente e l’osservatore sia L .
Il primo impulso raggiunge l’osservatore dopo un tempo t1 = L / u
dove u è la velocità delle onde emesse ( velocità del suono, oppure della luce
); questa è la nota formula V = S/T ( velocità = spazio / tempo ) . Il secondo
impulso parte al momento t2 = t0 + T = T e raggiunge l’osservatore dopo un tempo t3
= T + (L – vT) / u , essendo vT lo
spazio percorso dalla sorgente dal momento iniziale t0 al momento di
partenza del secondo impulso, T.
Come
risultato, l’osservatore rileva gli impulsi con un periodo pari a
Tdop = t3
– t1 = T + (L – vT ) /u – L/u = T ( 1 – v / u ).
Passando
alla frequenza, che è pari 1 / T,
fdop = 1 / Tdop
= f / ( 1 – v / u )
Esempio
dell’ambulanza ( sorgente in movimento ):
il
veicolo si muove a velocità 120 Km/h pari a 33,3 m/s = v
il
suono si propaga a 330 m/s = u
Se
la sirena suona a 1 KHz, l’osservatore percepisce il suono alla frequenza di
fdop
= 1000 / ( 1 – 33,3/330 ) = 1000 / ( 1 –
0,1 ) = 1111 Hz.
Quando
il mezzo invece si allontana, il ragionamento si inverte e la frequenza
percepita è più bassa = 1000 / ( 1 + 0,1) = 909 Hz.
Anche
per le onde elettromagnetiche, almeno per velocità dell’osservatore molto
piccole rispetto alla velocità della luce, valgono i conti precedenti e come
velocità delle onde u è da intendersi la velocità della luce c ( = 300.000
Km/sec ).
Un
esame più preciso darebbe la seguente formula
fdop
= f [(1+v/c )/(1- v/c) ] ½
approssimata dalla fdop
= f / ( 1 – v / u ) che, per v << c, da valori quasi uguali alla
fdop = f ( 1 + v / u ) più usata
per le onde elettromagnetiche.
CAPITOLO
2: L’EFFETTO DOPPLER NELLE ONDE RADIO E IL SUO USO PER INDIVIDUARE UNA SORGENTE
Quello
che si vuole fare, è sfruttare l’effetto Doppler per determinare la direzione
di provenienza di un segnale radio e, quindi, la direzione in cui si trova il
trasmettitore.
Si
consideri un dipolo verticale che si avvicina alla sorgente: esso percepirà un
segnale a frequenza più alta del reale (più bassa se si allontanasse). Non
potendo realizzarsi un dipolo “che corre
in linea retta”… si pensi invece ad un dipolo verticale che ruota intorno ad un paletto. Tale
dipolo continuamente si avvicina e si allontana dal trasmettitore, e questo
movimento provoca un periodico aumento e calo della frequenza ricevuta dal
ricevitore (osservatore) collegato a questo ipotetico dipolo. Se la velocità di
rotazione è costante, la frequenza aumenta e cala secondo una perfetta
sinusoide. Vedi figura 1.

Figura 1
Sia
F la frequenza con cui il dipolo ruota. Un segnale la cui frequenza aumenta e
cala, cioè varia, è bensì un segnale modulato in FM… ! Quindi, se il nostro
ricevitore possiede un discriminatore FM, questo segnale si tradurrà in un tono audio alla frequenza F ( ossia una tensione sinusoidale alla
frequenza F ). La risposta del discriminatore FM è infatti quella di figura 2.

Figura 2
Nota
pratica: il segnale ricevuto non deve necessariamente essere composto dalla
sola portante, perché questo tono audio si sovrappone alla eventuale
modulazione presente. Sono perciò utilizzabili da un sistema RDF Doppler
segnali CW, AM, FM, ma non segnali SSB, per i quali non è presente una
portante.
Esaminando
poi la fase del tono, confrontandola con il clock di riferimento usato per
ruotare l’antenna, si riesce a determinare l’angolo di provenienza del segnale
come vedremo fra poco.
Non
è però realizzabile meccanicamente un dipolo che ruota, perché per ottenere
risultati apprezzabili dovrebbe ruotare troppo velocemente…. Per curiosità,
calcoliamo a che velocità dovrebbe girare un dipolo per dare un certo effetto
Doppler. La formula che da lo shift di frequenza in base alla velocità di
un’antenna che ruota è la seguente ( formula di Doppler per sorgente ferma e
osservatore in movimento ):
S
= r w f / c ( discende dalla formula fdop
= f ( 1 + v / c ) valida per radioonde, u = c )
dove
S
= shift ( massima deviazione di frequenza ) in Hz = fdop – f
r
= raggio di rotazione del dipolo, in metri
w
= velocità angolare dell’antenna, in radianti / secondo = v/r
c
= velocità della luce in m/s
f
= frequenza della portante del segnale ricevuto.
Vediamo
in VHF che velocità risulta:
per
avere un effetto utilizzabile, deve essere S = 500 Hz almeno. Prendiamo come
raggio di rotazione r = 0,5 m, come frequenza f = 145 MHz.
Si
ha w = Sc / r f = 500 x 300000000 / 0,5 x 145000000 = 2069 rad/sec = 329
giri/sec = 329 Hz : proprio troppo alta per un sistema meccanico !
Si
ricorre perciò ad uno stratagemma; si montano più dipoli verticali, disposti a
cerchio, e poi si commuta tra di essi. Nelle soluzioni più comuni si usano
array di 4 – 6 oppure 8 dipoli. I dipoli possono essere sostituiti da
altrettanti semidipoli ( quarto d’onda ) posti nelle medesime posizioni, purché
muniti di un efficiente piano di terra. Il risultato del passare da una
rotazione continua ad una commutazione è evidenziato dalla figura 3.
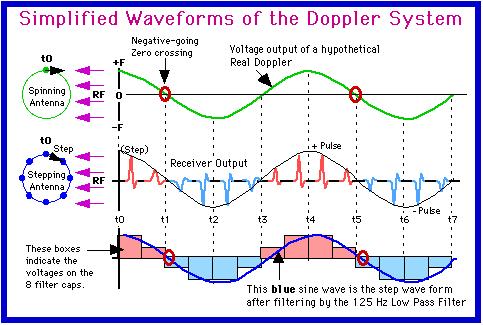
Figura 3
La
figura in alto con la sola sinusoide rappresenta il segnale uscente dal
demodulatore FM del ricevitore la cui antenna sia un dipolo rotante. Esaminiamo
la figura e notiamo che l’istante in cui si ha il massimo incremento della
frequenza ricevuta è il momento t0 che si ripete in t4
. E’ l’istante in cui l’antenna si sta
dirigendo direttamente incontro al trasmettitore. Ci sono poi i punti in cui la
variazione di frequenza è nulla rispetto alla frequenza realmente emessa, e
sono i punti t1 , t3
. Sono i momenti in cui il dipolo rotativo si trova rispettivamente alla
minima e massima distanza dal trasmettitore. Nel secondo grafico vediamo la
tensione presente sul discriminatore quando anziché un dipolo rotativo si usano
8 dipoli con commutazione. Integrando il segnale e filtrandolo, si riottene la
sinusoide, come si vede nel terzo grafico. Ai fini pratici, non vi è molta
differenza; il sistema si dovrebbe per correttezza chiamare “pseudo-Doppler”, ma questo termine è raramente usato.
Osserviamo
ora la figura 4.
Figura 4
Poniamo
particolare attenzione al momento t0, che è l’istante in cui, come
nel grafico precedente ripreso nella prima parte di questa figura, l’antenna si
sta dirigendo direttamente incontro al trasmettitore (ciò origina la più alta
frequenza percepita). Questa condizione
si ha nel momento in cui viene selezionata l’antenna in alto, che chiamiamo
antenna n. 1. Supponiamo sia EST la
parte destra della figura. Il sistema elettronico di controllo e
visualizzazione si riferisce sempre ad un determinato istante di partenza, che
per semplicità consideriamo ora che sia t0; vedremo che con l’operazione
di calibrazione dello strumento si otterrà sempre questa condizione.
Dunque
se il segnale radio proviene come indicato nel primo grafico, abbiamo la
corrispondente sinusoide.
Se
invece il segnale proviene da una fonte posta più a sud ( diciamo sud la parte
bassa rispetto al sistema delle 8 antenne ), il momento in cui si riceve la
frequenza più alta non è più t0, ma è quando l’antenna n.2 viene
inserita nel circuito. Il secondo grafico evidenzia questa situazione. Siccome
anche il secondo grafico parte da t0, la parte più alta della
sinusoide non è più in corrispondenza dell’inizio del grafico, ma è più a
destra, circa in corrispondenza al numero 2 della scala in basso. Si ha quindi
uno spostamento verso destra della sinusoide. Basta quindi un circuito che
sappia misurare di quanto si è spostata a destra la sinusoide ed avremo
misurato di quanti gradi la fonte trasmittente è spostata rispetto alla
direzione di calibrazione ( est, nei disegni qui sopra ).
Osserviamo
ora la scala più in basso nel disegno, quella coi numeri. I numeri vanno da 0 a
16 e si riferiscono ad un sistema con 8 antenne (disposte a esagono, 45 gradi
di distanza) e 16 led per visualizzare la direzione (quindi 22,5 gradi di
risoluzione). Ogni tacca nella scala è un impulso del clock del sistema. Un
impulso ogni due è utilizzato per commutare all’antenna successiva, mentre ogni
singolo impulso serve per individuare un led da accendere. L’unico led acceso
però sarà quello in cui nell’intervallo di clock “di sua pertinenza” si è verificato
l’attraversamento dello zero da parte della sinusoide.
Cerchiamo
di chiarire questo funzionamento. Osserviamo lo schema a blocchi del sistema
doppler riportato in figura 5.
Figura 5
Il
clock oscilla a 1600 Hz. Un impulso ogni due pilota lo switch delle antenne,
che pertanto funziona a 800 Hz. Siccome le antenne sono 8, è come se si avesse
un dipolo rotativo che ruota a 100 Hz, cioè che fa 100 giri al secondo.
Dal
ricevitore FM (esterno al circuito e qui indicato con FM Rcvr ) escono i segnali impulsivi, che passati dai condensatori
e dal filtro 125 Hz diventano la sinusoide del disegno (cleaned up sinewave).
Subito dopo il filtro c’è un circuito molto importante, il rilevatore di
passaggio per lo zero. Questo rilevatore (zero crossing detector) da in uscita
un 1 logico quando la sinusoide attraversa lo zero nella sua fase discendente.
In ogni altro instante da uscita logica 0 ( vale 0 anche quando viene
attraversato lo zero nella fase ascendente della curva).
Il
circuito logico di controllo dei led è fatto in modo tale per cui esso è pronto
ad accendere un singolo led in ogni istante, un led diverso per ogni ciclo di
clock. Tuttavia, il circuito accende ( e tiene acceso fino al giro successivo
del clock ) solo il led corrispondente all’impulso di clock coincidente con
l’attraversamento dello zero della sinusoide, quindi è comandato dal rilevatore
di zero-crossing.
NOTA:
il numero di led può aumentare per aumentare la risoluzione dello strumento. Ad
esempio se mettiamo 128 led, ed un clock di 12800 Hz, avremo una risoluzione di
2,81 gradi, quindi molto spinta. Le antenne saranno sempre 8, non ne occorrono
di più, e lo switch delle antenne funzionerà ancora a 800 Hz ( un impulso ogni
16).
Passiamo
ora ad un punto rimasto non chiaro, cioè la calibrazione. Tutto quanto detto
sopra va bene, a patto che si conosca il fatidico t0, l’istante in
cui si riceve la frequenza più alta quando la stazione trasmittente si trova ad
EST ( sempre riferiti ai disegni di cui sopra). La calibrazione si fa quando si
installa il sistema di antenna, infatti aiutandosi con un amico posto
esattamente ad EST, e distante qualche chilometro, si installa l’antenna in
modo che il led acceso sia quello giusto ! Se l’antenna viene posta su una
autovettura, può non essere agevole ruotarla ed installarla nell’esatta
direzione. Si interviene allora su un circuito che introduce un ritardo
variabile ( adjustable calibration delay ) in maniera da “spostare” il flag
dello zero-crossing detector nell’istante opportuno per far accendere il led
corretto.
CAPITOLO
3: COSTRUZIONE DI UN SISTEMA RDF DOPPLER
Per
la realizzazione di un sistema RDF Doppler sono tre i componenti fondamentali:
- L’elettronica di
comando e visualizzazione
- L’antenna
- Lo switch di
antenna.
ELETTRONICA di comando e visualizzazione
Per
l’elettronica, ci sono vari schemi e anche alcuni kit di montaggio, tutti
disponibili solo negli USA a quanto mi risulta, ma la cosa migliore è comperare
il solo circuito stampato e poi montare i componenti comperandoli in Italia.
Tra
le varie realizzazioni, ne cito tre che ho trovato in internet:
1) Roanoke doppler : è stato uno dei primi
sistemi RDF doppler, realizzato da Chuck Tavaris N4FQ ed è tuttora il più
diffuso. E’ un sistema che funziona con 4 antenne e 16 led, quindi ha
risoluzione di 22,5 gradi. E’ realizzato a logica cablata, con integrati CMOS e
TTL.
2) Montreal doppler, by VE2EMM, è un
sistema più moderno, realizzato con un microprocessore della serie PIC.
Funziona con 4 o 8 antenne e 32 led, quindi ha risoluzione di 11,25 gradi; ora
Jacques ha progettato il Montreal Doppler 3 che presenta un cerchio di 36 led
oltre ad un display con MENU e varie opzioni. Jacques è disponibile a fornire i
PIC già programmati e i circuiti stampati per la realizzazione dei suoi
progetti, ma null’altro, non esiste un kit completo e molti componenti vanno
recuperati tra internet e bancarelle….
3) Pico dopp, kit venduto parzialmente
assemblato, molto piccolo e molto ben fatto, funzionamento affidabile.
Disponibili diversi accessori come il display a 16 led oppure numerico,
interfaccia per computer ecc. Prezzo onesto, trovate tutto nel sito http://www.silcom.com/~pelican2/PicoDopp/PICODOPP.htm
4) A livello professionale, ma con costi
elevati, si consulti il sito della Doppler Systems www.dopsys.com che propone strumenti molto
precisi, oppure il sito della Winradio: http://www.winradio.com/home/wd3000.htm
Sull’elettronica
non c’è molto da dire, il principio di funzionamento è quello già visto, i
collegamenti esterni richiesti dall’unità di visualizzazione sono:
- Alimentazione 12
volt
- Audio proveniente
dal ricevitore
- Connessione al
sistema di switch delle antenne
ANTENNE:
l’antenna
consta di un array di 4, 6 oppure 8 antenne. Siccome il principio è lo stesso,
consideriamo il caso di quattro antenne. Esse possono essere 4 ground-plane ¼
d’onda oppure 4 dipoli interi mezz’onda. Si preferisce il sistema delle GP per
l’uso su automezzo, mentre per installazioni fisse o per spostarsi a piedi è molto
meglio usare i quattro dipoli. Nel caso delle GP, si consideri che la distanza
ottimale tra uno stilo e l’altro è circa 0,22 della lunghezza d’onda, quindi
per la banda dei 2 metri sono 46 cm. Occorre un piano di terra che sia almeno ¼
d’onda su tutte le direzioni, per ogni stilo. Di solito la soluzione preferita
è quella più pratica per essere montata sul tetto di un’auto: una piastra di
metallo di 50 cm di lato, che sostiene gli stili, i cavi coassiali e lo switch,
e otto radiali aggiuntivi, lunghi 50 cm circa, sporgenti due a due dai quattro
angoli della piastra, eventualmente ripiegabili per non sporgere troppo dal
veicolo ( vedi figura 6).

Figura 6
La
lunghezza degli stili non è proprio quella di ¼ d’onda risonante, perché provocherebbe
qualche errore di lettura dovuta proprio alla risonanza delle antenne. E’
consigliabile fare gli stili un po’ più corti, 47 cm anziché 50. Per i 430 MHz,
gli stili sono da 15 cm, agli angoli di un quadrato di lato 15 cm.
La
soluzione impiegante i dipoli prevede che gli stessi siano montati su tubi
isolanti disposti a croce, come si vede in foto, figura 7.

Figura 7
Da
parte mia, ho realizzato entrambi i tipi senza grosse difficoltà. La difficoltà
maggiore è nella realizzazione dello switch di antenna.
SWITCH delle antenne
Lo
switch è una parte fondamentale per il funzionamento del sistema. Uno switch
malfatto, oppure che non utilizza i giusti componenti, porta ad errori nella
rilevazione anche grossolani, oppure al non funzionamento dell’apparecchio.
Il
primo tipo di switch nato col progetto del Roanoke Doppler era composto dai
quattro cavi coassiali che vanno alle antenne tagliati di opportuna misura, e
da quattro diodi PIN veri autori della selezione dell’antenna. Questo progetto
però è stato abbandonato dopo che Joe Moell K0OV ha realizzato un sistema più
efficiente e più a larga banda che trovate nel sito http://www.homingin.com/newdopant.html
.
Lo
schema è riportato in figura 8.
Figura 8
La
particolarità principale di questo design è che la piastra che fa da base alle
antenne non è a massa con le lamiere
del veicolo ! Occorre tenere isolata la piastra, perché essa viene mantenuta ad
un potenziale di +3,7 volt rispetto al negativo della batteria dell’auto. Di
conseguenza, il cavo coassiale che porta il segnale al ricevitore ha la calza
NON collegata alla piastra, perché ciò provocherebbe corto-circuito dei 3,7
volt. La calza suddetta va collegata ad un condensatore da 680 pF il quale,
poi, va alla piastra ( C109 in figura ).
Da
notare che sono impiegati ben 8 diodi PIN, due per ogni antenna. Questi diodi
vengono polarizzati in diretta o in inversa a seconda che debbano condurre o
meno il segnale RF in quel momento. Per una realizzazione in banda VHF sono
sufficienti dei diodi tipo BA479, mentre per sistemi in UHF sarebbe meglio
reperire, e non è facile, dei diodi più performanti quali i Motorola MPN3401 o
MPN3404, oppure gli HSMP3892, o altri magari in custodia SMD.
Per
le VHF, le impedenze presenti nel circuito si fabbricano home-made, avvolgendo
24 spire serrate di filo smaltato da 0,4 mm su supporto di 5 mm; risulteranno
lunghe circa 10 mm. I condensatori è meglio siano del tipo a disco, adatti per
VHF. Le resistenze sono da 220 Ohm, i condensatori sono tutti da 680 pF.
Per
la banda dei 430 MHz la struttura è la stessa, cambiano solo alcuni componenti:
i
condensatori sono da 220 pF, mentre le induttanze hanno solo 12 spire, fermo
restando il supporto da 5mm.
La
foto di una realizzazione dello switch è
visibile in figura 9.
Figura 9
Non
è molto bello a vedersi, ma le cose fondamentali in questo circuito sono la
simmetria e il tenere i terminali dei componenti molto corti.
Occorre
montare il circuito switch all’interno di una scatola metallica che faccia da
schermo per la RF, ed è necessario che i quattro cavi coassiali che provengono
dai quattro stili abbiano tutti la stessa identica misura. Ogni errore in
questa uguaglianza porta a errori nella rilevazione della direzione. Sono
tollerabili errori fino a 5 mm.
CAPITOLO
4: USO DEL RILEVATORE DOPPLER
Descrivo
brevemente l’uso del rilevatore Roanoke Doppler, che ho realizzato utilizzando
il circuito stampato fornitomi da Dopplers by Greany: Ed Greany
KB6DOL. Si monta in modo stabile l’antenna sul
tetto dell’autovettura, in posizione centrale, smontando ogni altra antenna
eventualmente presente, che provocherebbe errori di rilevazione. Si portano
all’interno i due cavi, il coassiale e il cavo di comando dello switch; il
coassiale lo colleghiamo come una normale antenna ad un ricevitore,
sintonizzato sulla frequenza in cui è presente la stazione da inseguire. Il
cavo di comando dello switch lo colleghiamo all’unità di visualizzazione. C’è
poi un altro cavo che collega l’uscita audio del ricevitore all’unità. Siccome
inserendo il jack nella presa “altoparlante esterno” del ricevitore, viene
disabilitato l’altoparlante interno, l’unità di visualizzazione è munita di un
proprio altoparlante che riproduce l’audio ricevuto.
Accendiamo
sia l’unità che la radio, regoliamo il volume della radio finchè si spegne il
LED di “low level”, ma senza che si accenda quello di “overloading” . Quando poniamo in ON l’interruttore
denominato “scan”, dobbiamo sentire dall’altoparlante un tono a circa 100 Hz sovrapposto
al segnale entrante: questo tono ci conferma che il rilevatore sta funzionando,
e possiamo già vedere nel cerchio dei led accendersi quello indicante la
direzione di provenienza. Ovviamente, l’indicazione sarà esatta solo se avremo
svolto l’operazione di calibrazione
descritta in precedenza ! Non ci sono altri comandi, ci sono un paio di
trimmer interni che possiamo lasciare a metà corsa ed un deviatore che serve
per invertire la fase se l’indicazione dovesse essere sbagliata di 180° ; ciò
può capitare con alcuni ricevitori che invertono la fase del segnale audio
negli stadi di bassa frequenza. In fase di calibrazione si vede subito se il
nostro ricevitore necessita il deviatore posto in una posizione o nell’altra. E’ molto divertente, se ci sintonizziamo
all’ingresso di un ponte ripetitore, e siamo in buona posizione, osservare i
vari segnali provenienti dalle diverse direzioni. Modelli più evoluti,
professionali, di RDF Doppler permettono il collegamento di un GPS e di un PC
con l’unità, in modo da visualizzare sullo schermo del PC la mappa della zona
con indicata la direzione di provenienza del segnale.
CAPITOLO
5: CONSIDERAZIONI SUI SISTEMI DOPPLER, vantaggi e svantaggi
I
sistemi Doppler hanno il grande vantaggio, rispetto agli altri sistemi di
rilevamento della direzione di un segnale radio, di essere molto veloci. Al
circuito basta infatti meno di mezzo secondo per accendere il LED che indica la
direzione. Se montate un sistema di quattro dipoli sul tetto e il display in
casa, saprete sempre la direzione del segnale di chi state ascoltando. Un altro vantaggio è che
non vi sono parti in movimento, non serve un rotore; inoltre anche a breve
distanza dal trasmettitore da individuare, non serve l’attenuatore,
indispensabile in altri tipi di RDF. Enorme vantaggio è anche quello di poter
sistemare tutto l’impianto su un mezzo mobile.
Vi
sono però alcuni svantaggi che occorre tenere presenti, onde non aspettarsi
impossibili miracoli da questo tipo di strumenti:
- La precisione non è
eccellente. Abbiamo visto che nel miglior Doppler amatoriale la precisione
è 7,2 gradi, ma i doppler più comuni hanno solo 22,5 gradi di risoluzione.
- La lettura è
precisa solo se le antenne sono piuttosto libere da ostacoli, cioè se non
ci sono segnali riflessi. E’ sconsigliato l’uso tra edifici alti o tra le
montagne.
- Il sistema di
antenna è di tipo solo ricevente. Se per caso ci scappa il dito sul PTT,
bruciamo subito tutti i diodi PIN. Quindi se vogliamo ricevere e
trasmettere, occorre essere muniti di due radio e due antenne.
- Non è utilizzabile
per segnali SSB
- La sensibilità è
quella di un’antenna quarto d’onda, percui se il segnale da rilevare è
debole conviene usare in prima battuta un’antenna direttiva.
CAPITOLO 6: TIME DIFFERENCE
OF ARRIVAL RDF ( TDOA )
Adesso
che abbiamo visto un radiogoniometro Doppler, ci risulta immediato comprendere
il funzionamento del suo “fratello minore”, cioè il TDOA-RDF. Supponiamo di
avere un’antenna che si muove a velocità costante, in linea retta, avanti e
indietro su un cammino ortogonale al fronte dell’onda radio in arrivo. Vedi
figura 10.
Figura 10
Quando
l’antenna si avvicina al trasmettitore, si riceve una frequenza più alta,
mentre quando si allontana, si riceve la frequenza più bassa. Essendo la
velocità costante ed il moto rettilineo, la forma d’onda risultante da un
ideale discriminatore FM è un’onda quadra, a frequenza pari a 1/T dove T è il
tempo impiegato dall’antenna a percorrere il tratto rettilineo in andata e
ritorno.
Nella
pratica, si usa un sistema di due dipoli verticali commutati a frequenza
500 Hz.
Ciò,
unitamente alle caratteristiche del radioricevitore, provoca che il segnale
uscente dal discriminatore non è un’onda quadra ma una successione di impulsi,
come si vede nella parte destra della figura. Poco importa ciò nella pratica:
dall’altoparlante uscirà un tono a 500 Hz, sovrapposto al segnale della
stazione che stiamo ricevendo. L’ampiezza di questo tono (cioè il suo “volume”
) è proporzionale alla differenza tra la frequenza più alta e la più bassa
ricevute; il minimo scarto tra le frequenze si ha quando le antenne sono equidistanti dal trasmettitore, il massimo si
ha quando le antenne sono con il loro boom che “indica” il trasmettitore. In
particolare, quando le antenne sono equidistanti dal TX, il tono audio
scompare. Per usare questo sistema quindi occorre ruotare il sistema dei due
dipoli finché il tono audio scompare: in tale condizione il boom di sostegno
dei dipoli è parallelo al fronte d’onda, quindi ortogonale alla direzione di
provenienza del segnale.
Ovviamente,
rimane l’ambiguità di non sapere se il segnale proviene dal davanti o dal
retro, in quanto vi sono due posizioni in cui il tono scompare.
Questa
ambiguità può essere risolta in due modi:
·
inserendo
un interruttore nel circuito del sistema, che inserisca una linea di ritardo
del segnale su una delle antenne ( ciò porta ad un diagramma a cardioide )
·
inserendo
un circuito, sincrono col clock dello switch delle antenne, che “capisca” lo
sfasamento tra i due segnali ricevuti e lo indichi su uno strumentino.
Entrambe
le soluzioni sono semplici, ma le ritengo superflue in quanto basta fare
ascolto da due punti per poter fare una triangolazione senza ambiguità.
Lo
schema elettrico proposto da WB2HOL è riportato in figura 11.
Figura 11
Come
si vede, è semplicissimo. Al posto dei diodi 1N4007 consiglio i soliti BA479,
mentre l’induttanza è composta di 10 spire di filo 0,4mm avvolti su supporto di
5mm.
L’antenna
è costituita da due dipoli mezz’onda montati su un boom di 40 cm circa. La
lunghezza del boom può anche essere maggiore, ma deve comunque essere inferiore
a mezz’onda. Non ci sono componenti critici, occorre come al solito curare bene
la simmetria del montaggio. Questo circuito l’ho montato in una sera e ha
funzionato subito.
Un’idea
di come collegare i diodi all’antenna è data dalla figura 12:
Figura12
Il
circuito con il 555 può essere montato sul boom dietro il connettore BNC, e
viene alimentato da una pila 9V.
Lo
schema con la linea di ritardo lo trovate qui:
http://www.homingin.com/hfinderfix.html
Lo
schema con lo strumentino che indica lo sfasamento lo trovate qui:
http://home.att.net/~jleggio/projects/rdf/tdoa1.htm
ho
montato anche questo modello con lo strumentino e devo dire che funziona
egregiamente; lo strumento devia maggiormente più ci si scosta dall’esatta
direzione !
CONCLUSIONI:
I
metodi sopra descritti sono delle alternative all’uso di antenne direttive
convenzionali nella ricerca della provenienza di un segnale radio. Ciò non
significa che siano migliori o peggiori dell’impiego delle direttive, hanno i
loro vantaggi e i loro svantaggi, che abbiamo già esposto. La costruzione di un
sistema Doppler è comunque una bella esperienza, perché si vede messa in
pratica una teoria fisica.
Se
volete saperne di più sulla radio caccia, conviene acquistare il libro
“Transmitter
Hunting – radio direction finding simplified”
autori K0OV e WB6UZZ , che tratta parecchi metodi di radio-rilevazione.
Lo trovate in vendita in vari siti internet, ma non in Italia; il sito
ufficiale è il seguente:
http://www.homingin.com/THRDFSinfo.html
; costa 25$ + spedizione.
FOTO:
altre
foto delle mie realizzazioni DOPPLER: www.ariparma.it/fotodop.htm
BIBLIOGRAFIA:
oltre
al libro sopra citato, ho consultato vari siti internet, quasi tutti in lingua
inglese, tra cui segnalo:
teoria
del Doppler e TDOA: http://www.silcom.com/~pelican2/PULSES.html
schema
a blocchi di un altro TDOA : http://www.silcom.com/~pelican2/TD_CIRCUIT.html
altro
TDOA: http://www.ussc.com/~uarc/rptr/ark_df_desc.html
esempi
di effetto Doppler: http://www.physics.nad.ru/Physics/English/waves.htm
tabella
conversione AWG/mm : http://www.tnt-audio.com/gif/awg.gif
{kind=link}
Montreal Doppler: http://www.qsl.net/ve2emm
breve
teoria Doppler in italiano : http://www.bo.astro.it/sait/spigolature/spigo300base.html
Un
ringraziamento a
-
IK4GNJ Magri Francesco, ha
collaborato alla costruzione dell’antenna per VHF
-
IK4XQM Rosa Lorenzo, mi ha aiutato nei conti matematici
-
WB2HOL Joseph Leggio, che ha concesso di riportare i suoi schemi di TDOA
-
K0OV Joseph Moell, che ha concesso di riportare lo schema dello switcher
( fig. 8)
-
K6BMG George Andrews, che ha concesso di usare le figure 3, 4 e 5
La
mia auto con l’antenna VHF Doppler:
